1 min to read
业界自动驾驶技术方案类别概述
四类自动驾驶技术方案介绍:独立并行式、多任务共享网络、直接端到端、全栈可控端到端

四种技术方案架构图
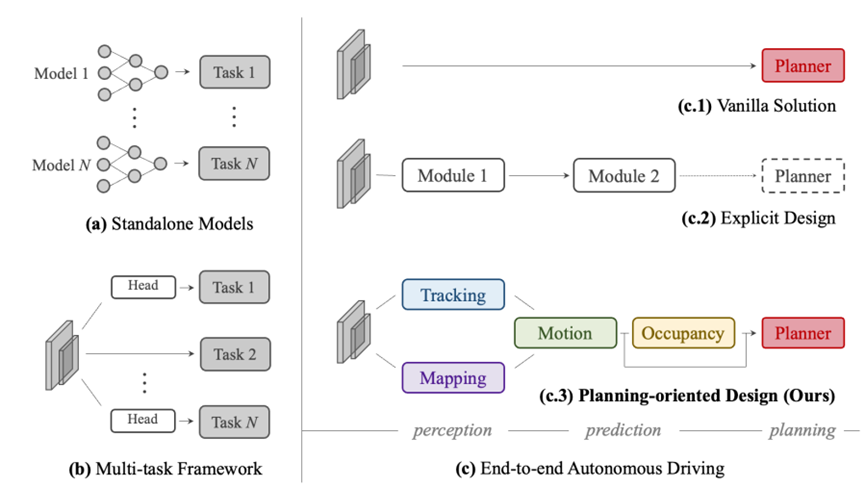 (a) 大多数工业解决方案针对不同的任务部署单独的模型。
(a) 大多数工业解决方案针对不同的任务部署单独的模型。
(b) 多任务学习方案与划分的任务负责人共享骨架。
(c) 端到端范式将感知和预测模块结合在一起。
- (c.1)中对规划进行直接优化
- (c.2)中设计带有部分组件的系统。
- (c.3)中认为,理想的系统应该以规划为导向,并正确组织先前的任务以便于规划。
独立并行模型
这种架构经典的实现就是Apollo的方案,将自动驾驶任务拆分成多个模块,每个模块有自己明确的任务,系统中并行运行;
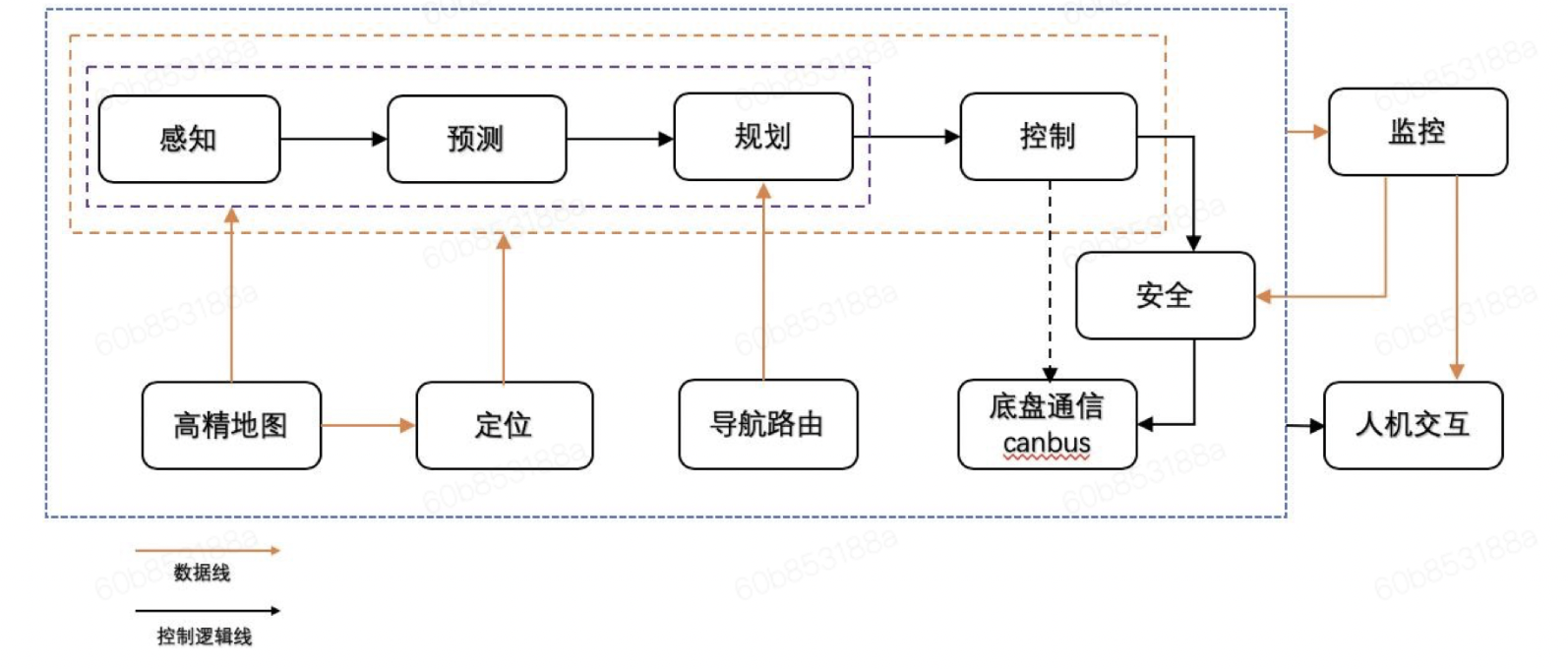
目前工业界量产方案绝大多数采用类似技术架构
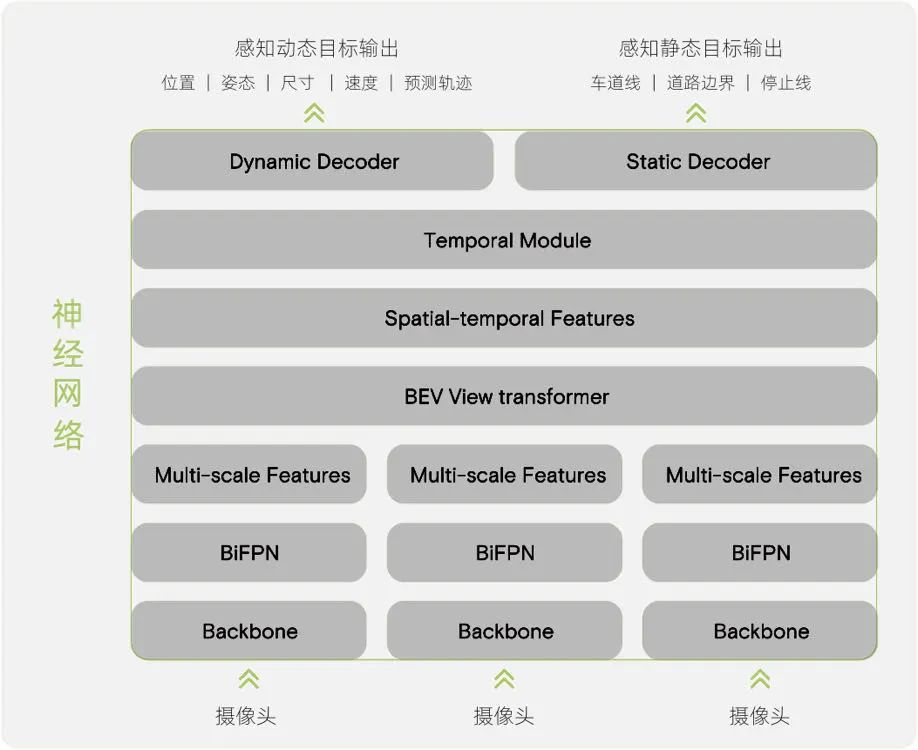
多任务共享网络
这种技术方案相比于独立并行模型,主要区别在于对感知模块进行了一定程度上的统一合并;
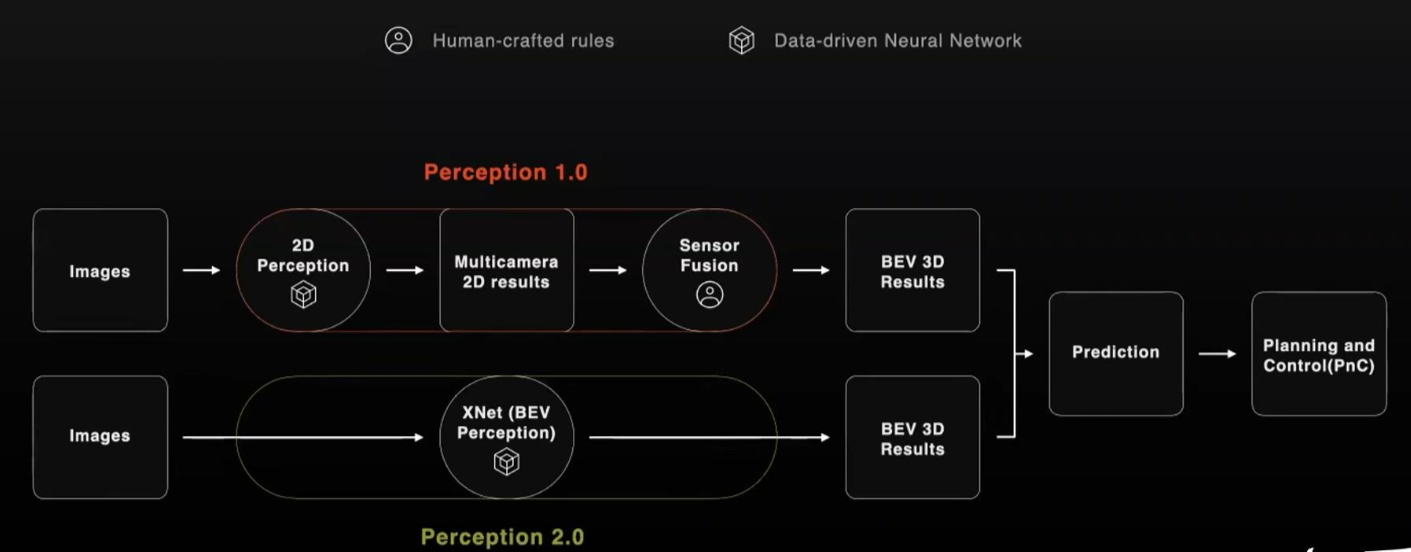
目前在工业界已经逐步开始落地;
直接端到端方案
全栈可控端到端方案
典型的技术方案是:UniAD论文提出的一套端到端的框架,将目标检测、目标跟踪、建图、轨迹预测、栅格预测、路径规划六项任务整合到一个模型中;
Comments